Manually move robots
For business processes that use robotics, unexpected high-volume workloads can overwhelm a work group and the robots assigned to the work group. This situation can limit the number of cases that a robot can successfully resolve on time because assignments are processed in sequence. Administrators can use Pega Robot Manager™ to move robots to a different work group to help process more cases. By moving robots to a different work group, organizations can handle a growing amount of work by processing cases in parallel because each robot has a dedicated machine.
To move robots between work groups, you must define a list of eligible candidate work groups for each administrative operator (registration operator) that registered the robots. All robots that were registered by the same administrative operator can move to those work groups, either manually or by using a schedule.
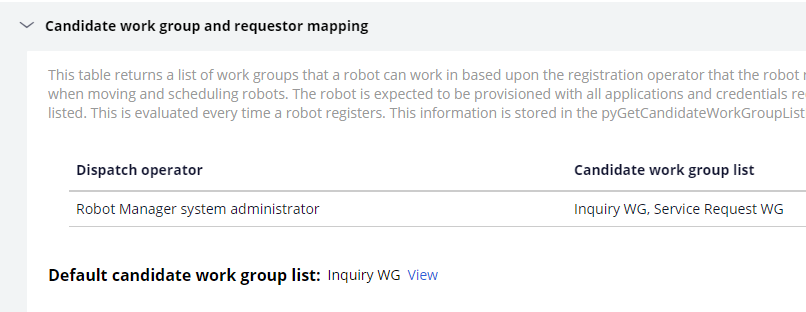
Robots can move only to the candidate work groups that are mapped to their registration operator in the Candidate work group by requestor mapping on the Robot Registration tab of the Robot Manager portal . This decision mapping is associated with the pyGetCandidateWorkGroupListByDispatchOperator decision table. In the following example, the registration operator, RMSysAdmin, is configured to process cases in both the Inquiry and Service Request work groups:
There are two options for moving robots within Pega Robot Manager. For more information on each option for moving robots, see the following articles on the Pega Documentation website:
Check your knowledge with the following interaction:
If you are having problems with your training, please review the Pega Academy Support FAQs.
Want to help us improve this content?